Undergraduate Dissertation: Combatting the de-skilling of modern drivers through the development of an implicit in-car navigation system

To download a PDF of this research, click here.
Overview
For this dissertation, I looked into the problems caused by modern satellite navigation systems. The current crop of turn-by-turn instruction based systems have been found to cause a lack of navigational skill development on the part of the user, due to them being happy to blindly follow the instructions presented to them. This may cause problems when a driver is left without their navigational aids and must rely on their own abilities to get to their destination.
To combat this, I created an implicit satellite navigation system called FuzzNav, which was built upon simple audio-based feedback to guide the user to the desired location without explicitly telling them the route to take. The system was based on the concept of the Sonar system which uses a beeping sound that becomes faster as it nears its target. My navigation system allows the user to type in their destination and emits a beeping sound for the duration of the journey, increasing and decreasing in speed depending on the progress being made by the driver. This allows the driver to engage with their surroundings while navigating without the fear of getting completely lost.
The system was created as an Android application (API Level 16) using Android Studio and was programmed in the Java language. Functionality was created using Android Location Services and the Google Maps Distance Matrix API.
Results
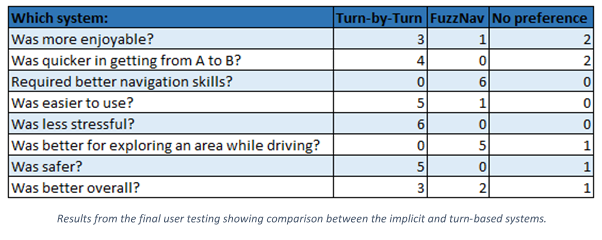
The final application was tested through user testing with six volunteer drivers. They were asked to complete two journeys, one using my system and one using a turn-based system. They then completed a short interview and questionnaire. Feedback was mixed about the implicit system, with the majority of users choosing it as the system that required the greater navigational skills of the two, as well as the one that allowed for better interaction with the surroundings. However, the system was also deemed more stressful than the turn-based system and issues were also raised regarding the safety of using such a system.
The aim of the project was to test the feasibility of the concept of implicit navigation systems, something that was achieved during the final testing phase. However, future work in the area is required to assess the long-term advantages of using such a system, as well as looking into the potential safety issues that became apparent during testing.